Italiano
Sulle strade verdi, sui sentieri escursionistici e negli spazi pubblici a uso misto, la domanda che sorge più spesso non è «quante persone passano?» ma «quanti pedoni, quanti ciclisti e forse quanti altri tipi di utenti?» ». Questa distinzione, quella che i professionisti del conteggio chiamano classificazione a più flussi, è spesso decisiva per dimensionare un layout, valutare un conflitto d'uso, giustificare una richiesta differenziata di finanziamento o produrre una valutazione d'impatto per tipo di mobilità. Tuttavia, non tutti i sensori sanno come fare questa distinzione. Alcuni contano senza differenziare. Altri si differenziano male o in modo inaffidabile. E alcuni riescono a farlo in modo nativo, con una precisione sufficiente per gli usi territoriali. Questo articolo spiega come funziona la classificazione multi-stream, quali tecnologie la consentono effettivamente e quali sono i limiti da conoscere prima di scegliere un sensore.

In un contesto di sviluppo della mobilità attiva, i gestori dell'infrastruttura hanno bisogno di dati differenziati, non solo di conteggio globale.
Per ridimensionare i layout. Una greenway che accoglie l'80% dei ciclisti e il 20% dei pedoni non è progettata allo stesso modo di una strada con un uso equilibrato. La larghezza della corsia, le zone di passaggio, le aree di sosta, la segnaletica stradale e la pavimentazione dipendono tutti dal mix di utenti reali. Un conteggio complessivo non consente questa calibrazione.
Per valutare i conflitti d'uso. Su una strada mista, i conflitti tra pedoni e ciclisti (velocità, sorpasso, sensazione di insicurezza) sono legati al rapporto tra i due flussi e ai picchi di compresenza. Sapere che in un sabato estivo a fine mattinata il 70% dei passaggi è occupato da ciclisti permette di anticipare le aree di tensione e di adattare la gestione del sito.
Per giustificare un finanziamento differenziato. I programmi AVELO finanziano strutture ciclistiche. I programmi per promuovere le aree naturali finanziano i percorsi pedonali. Un caso basato su dati differenziati può applicarsi a entrambe le fonti di finanziamento in modo credibile. Un caso con un conteggio complessivo non può dimostrare che l'infrastruttura serva principalmente ciclisti o pedoni.
Produrre indicatori di mobilità attiva coerenti. Gli osservatori regionali e nazionali della mobilità attiva richiedono dati differenziati per alimentare i loro indicatori. Una comunità in grado di dichiarare «abbiamo misurato 4.200 ciclisti e 1.800 pedoni a settimana su questo asse» contribuisce a database territoriali molto più utili di una comunità che dichiara «abbiamo misurato 6.000 attraversamenti».
Per distinguere un pedone da un ciclista, un sensore deve analizzare almeno uno dei seguenti segnali: la dimensione o la forma del soggetto rilevato, la sua velocità di movimento, la sua impronta sul terreno o la sua firma energetica.
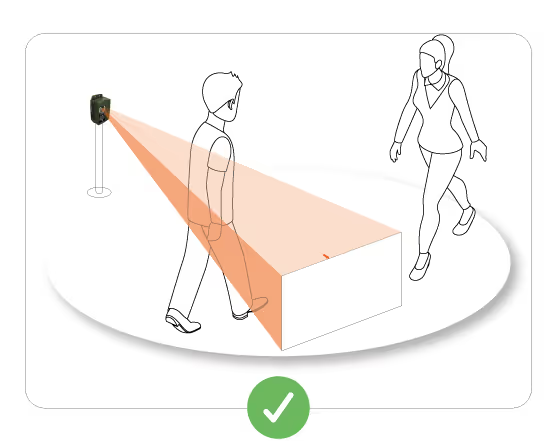
La dimensione e la forma. Un ciclista in bicicletta occupa una superficie verticale più alta e più larga di un pedone in piedi. Su un sensore termico, l'impronta di un ciclista in movimento è caratteristica: massa estesa orizzontalmente (la bici), punto caldo all'altezza del torace. Un pedone ha una firma più stretta e verticale.
La velocità. Un ciclista si muove in genere tra 12 e 25 km/h su una greenway. Pedone tra 3 e 6 km/h. Questa differenza di velocità è un forte segnale discriminante che i sensori con analisi della traiettoria possono sfruttare.
L'impronta sul terreno. I sensori interrati (anelli induttivi, pneumatici) rilevano l'impronta fisica sul terreno: ruota di bicicletta vs piede umano, massa metallica vs assenza di massa. Questi segnali consentono la differenziazione su determinati profili, ma con limitazioni significative (bici da carico, scooter, PMR nelle sedie a rotelle motorizzate).
La combinazione di più segnali. I sensori più efficienti non si basano su un singolo segnale ma su una combinazione (dimensione + velocità + forma) analizzata da un algoritmo di classificazione. Questo approccio è più robusto dei metodi a segnale singolo perché mantiene una precisione accettabile anche quando uno dei segnali è rumoroso o ambiguo.
Non tutte le tecnologie di conteggio sono uguali quando si tratta di classificazione multi-stream. Ecco il vero status di ogni famiglia numerosa.
Oggi è la tecnologia che offre il miglior rapporto precisione/facilità di installazione per la classificazione dei pedoni/ciclisti all'esterno. Il doppio sensore stereoscopico analizza la scena in tre dimensioni, consentendo di misurare con buona precisione l'altezza e la larghezza del soggetto rilevato.
L'algoritmo di classificazione analizza la firma termica, l'altezza, la larghezza e la velocità di ogni passaggio in tempo reale. I tassi di classificazione corretti raggiungono il 90-95% in condizioni normali, il che è più che sufficiente per gli usi territoriali. Il tutto senza un'immagine, senza un identificatore, in conformità nativa con il RGPD.
Limite principale: il passaggio simultaneo di un pedone e di un ciclista può generare confusione nella classificazione. Le configurazioni molto dense rimangono difficili da gestire perfettamente per qualsiasi tecnologia.
I sensori radar misurano la velocità e la direzione degli oggetti in movimento. Sono in grado di distinguere flussi di velocità molto diversi (pedone a 4 km/h vs ciclista a 20 km/h) con buona affidabilità. D'altra parte, due utenti con velocità simile (un pedone veloce e un ciclista lento) potrebbero essere classificati erroneamente.
I radar sono robusti in caso di maltempo e di notte, ma la loro precisione di classificazione è generalmente inferiore a quella dei sensori termici stereoscopici. Sono più adatti alle superstrade dove c'è una marcata differenza di velocità tra i flussi.
Le telecamere combinate con il software di analisi video offrono teoricamente la classificazione più ricca: forma, dimensione, velocità, comportamento, colore. Tuttavia, pongono gravi problemi di conformità al GDPR (anche se sfocate, acquisiscono dati visivi in uno spazio pubblico), richiedono un'infrastruttura elettrica permanente e generano costi operativi significativi.
Rimangono pertinenti in contesti molto specifici (ingressi a siti privati con controllo degli accessi, aree ad alta densità in cui la ricchezza di dati giustifica i vincoli) ma non sono adattati agli attuali usi territoriali.
Queste tecnologie interrate consentono una differenziazione limitata: il circuito induttivo rileva le masse metalliche (biciclette classiche sì, pedoni no); il tubo pneumatico è in grado di distinguere due ruote ravvicinate (bicicletta) da urti alternati (pedoni) con algoritmi adattati.
Ma non producono una classificazione affidabile su flussi misti complessi e non rilevano biciclette con telaio in carbonio, scooter elettrici o sedie a rotelle motorizzate. Per una vera greenway a uso misto, queste tecnologie sono insufficienti.
Anche le migliori tecnologie di classificazione hanno dei limiti che ogni utente dovrebbe conoscere.
Profili atipici. Un ciclista che cammina accanto alla sua bici (per attraversare un ostacolo o per fermarsi) sarà classificato come pedone. Un pedone che spinge un passeggino ingombrante può essere classificato come ciclista su alcuni sensori. I bambini in bicicletta hanno una firma molto diversa dagli adulti in bicicletta. Questi casi marginali generano occasionali errori di classificazione.
Passaggi simultanei. Quando un pedone e un ciclista attraversano contemporaneamente il campo di rilevamento, i sensori meno sofisticati possono contarli come un unico passaggio o classificarli in modo errato. I sensori stereoscopici gestiscono meglio questa situazione grazie alla loro analisi approfondita, ma non perfettamente.
Velocità atipiche. Un ciclista molto lento (che osserva un paesaggio, che cerca la sua strada) può avere una velocità prossima a quella di un pedone veloce. In questo caso, la classificazione basata solo sulla velocità non è affidabile. I sensori che combinano velocità e forma sono migliori.
Degrado notturno. Su strade scarsamente illuminate, alcune tecnologie vedono peggiorare la loro precisione di classificazione durante la notte. I sensori termici sono meno interessati perché non dipendono dalla luce visibile, ma le variazioni della temperatura ambiente notturna possono modificare la firma termica.
Il margine di errore di classificazione rispetto al margine di errore di conteggio. Un sensore può avere un'eccellente precisione complessiva di conteggio (95-98%) ma una precisione di classificazione inferiore (88-92%). Queste due metriche sono distinte e devono essere richieste separatamente al fornitore. Un sensore che conta bene ma si classifica male non soddisfa l'esigenza se l'obiettivo principale è la distinzione tra pedoni e ciclisti.
Per evitare spiacevoli sorprese, ecco le domande da porre sempre a qualsiasi fornitore di sensori multi-flusso.
Qual è l'accuratezza della classificazione (e non solo del conteggio) sui canali misti? Richiedi dati di convalida su siti simili al tuo: stesso tipo di strada, stesso mix di utenti, stesso contesto ambientale.
Quale algoritmo viene utilizzato per la classificazione? Un algoritmo a segnale singolo (solo velocità o sola dimensione) è meno robusto di un algoritmo multimodale che combina diversi parametri. La trasparenza sul metodo è un indicatore di serietà.
Come si comporta il sensore su profili atipici? Ciclisti lenti, pedoni veloci, bici da carico, scooter, sedie a rotelle: chiedete come viene trattato e classificato ogni profilo.
L'accuratezza della classificazione viene mantenuta di notte e in caso di maltempo? Le condizioni degradate rivelano i veri limiti delle tecnologie.
È possibile ottenere dati di classificazione grezzi per il controllo della qualità? Un fornitore che non consente l'accesso a dati di classificazione dettagliati rende impossibile qualsiasi controllo della qualità dei dati.
La classificazione multi-stream con un singolo sensore è possibile e affidabile nella maggior parte delle configurazioni standard. Ma ci sono situazioni in cui è necessario un dispositivo più elaborato.
È sufficiente un solo sensore su una corsia pedonale/ciclistica ad uso misto con una larghezza da 2 a 4 metri, flussi separati nel tempo (pochi passaggi simultanei) e nei profili utente standard (adulti, velocità normale). In questo contesto, un sensore termico stereoscopico ben installato produce una classificazione affidabile al 90-95%.
Un solo sensore non è sufficiente su un binario molto largo (più di 5 metri) dove i flussi si intersecano costantemente, su un sito ad altissima densità con numerosi passaggi simultanei, o in configurazioni in cui profili molto atipici (grandi bici da carico, veicoli per la mobilità non standard) rappresentano una parte significativa dei flussi.
Due sensori complementari — uno orientato ai flussi a sinistra, l'altro ai flussi a destra — può risolvere i problemi dei canali molto ampi o dei flussi bidirezionali intensi.
Un sensore + un audit di convalida manuale puntuale (conteggio manuale su alcuni giorni di riferimento) consente di calibrare gli algoritmi di classificazione e di convalidare l'affidabilità del dispositivo su un sito specifico. Questo approccio è consigliato per i siti ad alto rischio in cui l'accuratezza della classificazione è una condizione per decisioni di investimento significative.



.svg)