Auf Grünflächen, Wanderwegen und gemischt genutzten öffentlichen Räumen ist die Frage, die am häufigsten auftaucht, nicht „wie viele Menschen kommen vorbei?“ sondern „wie viele Fußgänger, wie viele Radfahrer und möglicherweise wie viele andere Nutzertypen?“ “. Diese Unterscheidung — was Zählfachleute als Multi-Flow-Klassifizierung bezeichnen — ist oft ausschlaggebend für die Dimensionierung einer Anlage, die Bewertung eines Nutzungskonflikts, die Rechtfertigung eines differenzierten Finanzierungsantrags oder die Erstellung einer Folgenabschätzung nach Art der Mobilität. Allerdings wissen nicht alle Sensoren, wie man diese Unterscheidung trifft. Manche zählen, ohne zu unterscheiden. Andere unterscheiden schlecht oder unzuverlässig. Und einigen gelingt dies von Haus aus, mit ausreichender Präzision für territoriale Zwecke. In diesem Artikel wird erklärt, wie die Multistream-Klassifizierung funktioniert, welche Technologien dies tatsächlich ermöglichen und welche Einschränkungen Sie beachten müssen, bevor Sie sich für einen Sensor entscheiden.

Vor dem Hintergrund der Entwicklung der aktiven Mobilität benötigen Infrastrukturbetreiber differenzierte Daten, nicht nur globale Zählungen.
Um die Layouts zu dimensionieren. Ein grüner Weg, der 80% der Radfahrer und 20% der Fußgänger willkommen heißt, ist nicht so konzipiert wie eine Straße mit ausgewogener Nutzung. Fahrbahnbreite, Überholzonen, Rastplätze, Verkehrsschilder und Gehwege hängen alle von der Mischung der tatsächlichen Nutzer ab. Eine Gesamtzählung erlaubt diese Kalibrierung nicht.
Zur Bewertung von Nutzungskonflikten. Auf einer gemischten Straße hängen Konflikte zwischen Fußgängern und Radfahrern (Geschwindigkeit, Überholmanöver, Gefühl der Unsicherheit) mit dem Verhältnis zwischen den beiden Strömen und mit Spitzenwerten der Kopräsenz zusammen. Wenn man weiß, dass an einem Sommersamstag am Ende des Vormittags 70% der Passagen von Radfahrern befahren werden, ist es möglich, Spannungsbereiche zu antizipieren und die Verwaltung des Geländes anzupassen.
Um eine differenzierte Finanzierung zu rechtfertigen. AVELO-Programme finanzieren Radfahranlagen. Programme zur Förderung von Naturgebieten finanzieren Fußgängerwege. Ein Fall, der auf differenzierten Daten basiert, kann glaubwürdig auf beide Finanzierungsquellen zutreffen. Ein Fall mit einer Gesamtzahl kann nicht belegen, dass die Infrastruktur in erster Linie Radfahrern oder Fußgängern dient.
Um konsistente Indikatoren für aktive Mobilität zu erstellen. Regionale und nationale Observatorien für aktive Mobilität benötigen für ihre Indikatoren differenzierte Daten. Eine Gemeinde, die in der Lage ist, zu erklären: „Wir haben 4.200 Radfahrer und 1.800 Fußgänger pro Woche auf dieser Achse gemessen“, trägt zu wesentlich nützlicheren territorialen Datenbanken bei als eine Gemeinde, die angibt, „wir haben 6.000 Kreuzungen gemessen“.
Um einen Fußgänger von einem Radfahrer zu unterscheiden, muss ein Sensor mindestens eines der folgenden Signale analysieren: die Größe oder Form des erkannten Objekts, seine Bewegungsgeschwindigkeit, seinen Fußabdruck auf dem Boden oder seine Energiesignatur.
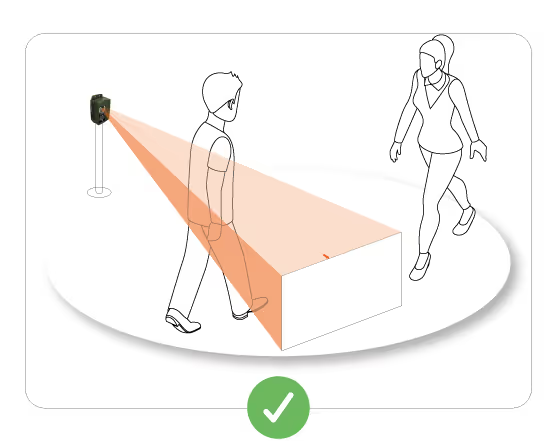
Die Größe und die Form. Ein Radfahrer auf seinem Fahrrad nimmt eine senkrechte Fläche ein, die höher und breiter ist als ein stehender Fußgänger. Auf einem Wärmesensor ist die Signatur eines Radfahrers in Bewegung charakteristisch: horizontal ausgestreckte Masse (das Fahrrad), heißer Punkt auf Brusthöhe. Ein Fußgänger hat eine schmalere und senkrechtere Signatur.
Die Geschwindigkeit. Ein Radfahrer bewegt sich normalerweise zwischen 12 und 25 km/h auf einem Greenway. Ein Fußgänger zwischen 3 und 6 km/h. Dieser Geschwindigkeitsunterschied ist ein starkes Unterscheidungssignal, das Sensoren mit Trajektorienanalyse ausnutzen können.
Der Fußabdruck auf dem Boden. Vergrabene Sensoren (Induktionsschleifen, Pneumatik) erkennen den physischen Fußabdruck auf dem Boden: Fahrradrad gegen menschlichen Fuß, Metallmasse gegen fehlende Masse. Diese Signale ermöglichen eine Differenzierung anhand bestimmter Profile, allerdings mit erheblichen Einschränkungen (Lastenräder, Roller, PMR in motorisierten Rollstühlen).
Die Kombination mehrerer Signale. Die effizientesten Sensoren basieren nicht auf einem einzelnen Signal, sondern auf einer Kombination — Größe + Geschwindigkeit + Form —, die durch einen Klassifizierungsalgorithmus analysiert wird. Dieser Ansatz ist robuster als Einzelsignalmethoden, da er auch dann eine akzeptable Genauigkeit beibehält, wenn eines der Signale verrauscht oder mehrdeutig ist.
Nicht alle Zähltechnologien sind gleich, wenn es um die Multistream-Klassifizierung geht. Hier ist der wahre Status jeder großen Familie.
Heute ist es die Technologie, die das beste Verhältnis von Genauigkeit und Montagefreundlichkeit für die Klassifizierung von Fußgängern/Radfahrern im Freien bietet. Der duale stereoskopische Sensor analysiert die Szene dreidimensional, sodass Höhe und Breite des erkannten Objekts mit guter Präzision gemessen werden können.
Der Klassifizierungsalgorithmus analysiert die Wärmesignatur, Höhe, Breite und Geschwindigkeit jedes Durchgangs in Echtzeit. Die korrekten Klassifizierungsraten liegen unter normalen Bedingungen bei 90 bis 95% — was für territoriale Nutzungen mehr als ausreichend ist. Alles ohne Bild, ohne Kennzeichnung, in nativer Übereinstimmung mit der RGPD.
Hauptlimit: Wenn ein Fußgänger und ein Radfahrer gleichzeitig nebeneinander vorbeifahren, kann dies zu Verwirrung bei der Klassifizierung führen. Sehr dichte Konfigurationen lassen sich für jede Technologie nach wie vor nur schwer perfekt verwalten.
Radarsensoren messen die Geschwindigkeit und Richtung bewegter Objekte. Sie können sehr unterschiedliche Geschwindigkeitsflüsse (Fußgänger mit 4 km/h und Radfahrer mit 20 km/h) mit guter Zuverlässigkeit unterscheiden. Andererseits können zwei Nutzer mit ähnlicher Geschwindigkeit (ein schneller Fußgänger und ein langsamer Radfahrer) falsch klassifiziert werden.
Radare sind bei schlechtem Wetter und in der Nacht robust, aber ihre Klassifizierungsgenauigkeit ist im Allgemeinen niedriger als die von stereoskopischen Wärmesensoren. Sie eignen sich besser für Schnellstraßen, auf denen ein deutlicher Geschwindigkeitsunterschied zwischen den Flüssen besteht.
Kameras in Kombination mit Videoanalysesoftware bieten theoretisch die umfassendste Klassifizierung: Form, Größe, Geschwindigkeit, Verhalten, Farbe. Sie stellen jedoch große Probleme bei der Einhaltung der DSGVO dar (auch wenn sie verschwommen sind, erfassen sie visuelle Daten im öffentlichen Raum), erfordern eine permanente elektrische Infrastruktur und verursachen erhebliche Betriebskosten.
Sie bleiben in sehr spezifischen Kontexten relevant — Eingänge zu privaten Standorten mit Zugangskontrolle, Gebiete mit hoher Dichte, in denen die Fülle an Daten die Einschränkungen rechtfertigt —, aber sie sind nicht an die aktuelle territoriale Nutzung angepasst.
Diese vergrabenen Technologien ermöglichen eine begrenzte Differenzierung: Die induktive Schleife erkennt Metallmassen (klassische Fahrräder ja, Fußgänger nein); die pneumatische Röhre kann mit angepassten Algorithmen zwei nahe beieinander liegende Räder (Fahrrad) von wechselnden Schlägen (Fußgänger) unterscheiden.
Sie liefern jedoch keine zuverlässige Klassifizierung komplexer gemischter Ströme und erkennen keine Fahrräder mit Carbonrahmen, Elektroroller oder motorisierte Rollstühle. Für eine wirklich gemischte Nutzung sind diese Technologien unzureichend.
Selbst die besten Klassifizierungstechnologien haben Einschränkungen, die jeder Benutzer kennen sollte.
Atypische Profile. Ein Radfahrer, der neben seinem Fahrrad läuft (um ein Hindernis zu überqueren oder anzuhalten), wird als Fußgänger eingestuft. Ein Fußgänger, der einen sperrigen Kinderwagen schiebt, kann aufgrund einiger Sensoren als Radfahrer eingestuft werden. Kinder auf Fahrrädern haben eine ganz andere Signatur als Erwachsene auf Fahrrädern. Diese Randfälle führen gelegentlich zu Klassifikationsfehlern.
Gleichzeitige Passagen. Wenn ein Fußgänger und ein Radfahrer gleichzeitig das Erkennungsfeld passieren, können die weniger ausgeklügelten Sensoren sie als einen einzigen Durchgang zählen oder sie falsch klassifizieren. Stereoskopische Sensoren kommen dank ihrer eingehenden Analyse besser mit dieser Situation zurecht, allerdings nicht perfekt.
Atypische Geschwindigkeiten. Ein sehr langsamer Radfahrer (der eine Landschaft beobachtet, der seinen Weg sucht) kann eine Geschwindigkeit haben, die der eines schnellen Fußgängers nahe kommt. In diesem Fall ist eine Klassifizierung, die allein auf der Geschwindigkeit basiert, unzuverlässig. Sensoren, die Geschwindigkeit und Form kombinieren, schneiden besser ab.
Nächtlicher Abbau. Auf schlecht beleuchteten Straßen verschlechtert sich die Klassifizierungsgenauigkeit einiger Technologien in der Nacht. Wärmesensoren sind weniger betroffen, da sie nicht auf sichtbares Licht angewiesen sind. Änderungen der nächtlichen Umgebungstemperaturen können jedoch die Wärmesignatur verändern.
Die Marge des Klassifizierungsfehlers im Vergleich zur Marge des Zählfehlers. Ein Sensor kann eine hervorragende Gesamtzählgenauigkeit (95— 98%), aber eine geringere Klassifikationsgenauigkeit (88— 92%) aufweisen. Diese beiden Kennzahlen sind unterschiedlich und sollten separat beim Lieferanten angefordert werden. Ein Sensor, der gut zählt, aber schlecht abschneidet, erfüllt nicht die Anforderungen, wenn die Unterscheidung zwischen Fußgängern und Radfahrern das Hauptziel ist.
Um unangenehme Überraschungen zu vermeiden, sollten Sie jedem Anbieter von Multi-Flow-Sensoren immer die folgenden Fragen stellen.
Wie genau ist die Klassifizierung (nicht nur das Zählen) auf gemischten Kanälen? Fordern Sie Validierungsdaten auf Websites an, die Ihrem ähnlich sind: derselbe Straßentyp, dieselbe Nutzermischung, derselbe Umweltkontext.
Welcher Algorithmus wird für die Klassifizierung verwendet? Ein Einzelsignal-Algorithmus (Geschwindigkeit allein oder Größe allein) ist weniger robust als ein multimodaler Algorithmus, der mehrere Parameter kombiniert. Die Transparenz der Methode ist ein Indikator für Seriosität.
Wie verhält sich der Sensor bei atypischen Profilen? Langsame Radfahrer, schnelle Fußgänger, Lastenräder, Roller, Rollstühle — fragen Sie, wie jedes Profil behandelt und klassifiziert wird.
Wird die Klassifikationsgenauigkeit nachts und bei schlechtem Wetter aufrechterhalten? Degradierte Bedingungen zeigen die wahren Grenzen der Technologien auf.
Können Rohdaten zur Klassifizierung für die Qualitätskontrolle abgerufen werden? Ein Anbieter, der keinen Zugriff auf detaillierte Klassifizierungsdaten gewährt, macht jegliche Datenqualitätsüberprüfung unmöglich.
Die Multistream-Klassifizierung mit einem einzigen Sensor ist in den meisten Standardkonfigurationen möglich und zuverlässig. Es gibt jedoch Situationen, in denen ein aufwändigeres Gerät benötigt wird.
Ein einziger Sensor ist ausreichend auf einer gemischt genutzten Fußgänger-/Radfahrerspur mit einer Breite von 2 bis 4 Metern, zeitlich getrennten Flüssen (wenige gleichzeitige Durchfahrten) und Standardnutzerprofilen (Erwachsene, normale Geschwindigkeiten). In diesem Zusammenhang liefert ein gut installierter stereoskopischer Wärmesensor eine Klassifizierung, die zu 90— 95% zuverlässig ist.
Ein einziger Sensor reicht nicht auf einer sehr breiten Strecke (mehr als 5 Meter), auf der sich die Ströme ständig kreuzen, auf einem Gelände mit sehr hoher Dichte und zahlreichen gleichzeitigen Passagen oder in Konfigurationen, bei denen sehr atypische Profile (große Lastenräder, nicht standardmäßige Mobilitätsfahrzeuge) einen erheblichen Teil der Ströme ausmachen.
Zwei sich ergänzende Sensoren — eine orientiert sich an den Strömungen auf der linken Seite, die andere an den Strömungen auf der rechten Seite — kann die Probleme sehr breiter Kanäle oder intensiver bidirektionaler Strömungen lösen.
Ein Sensor + ein manuelles Validierungsaudit pünktlich (manuelles Zählen über einige Referenztage) ermöglicht es, die Klassifizierungsalgorithmen zu kalibrieren und die Zuverlässigkeit des Geräts an einem bestimmten Standort zu überprüfen. Dieser Ansatz wird für Standorte empfohlen, bei denen viel auf dem Spiel steht und bei denen die Genauigkeit der Klassifizierung eine Voraussetzung für wichtige Investitionsentscheidungen ist.



.svg)