English
On greenways, hiking trails, and mixed-use public spaces, the question that comes up most often is not “how many people pass by?” but “how many pedestrians, how many cyclists, and possibly how many other types of users?” ”. This distinction — what counting professionals call multi-flow classification — is often decisive in sizing a layout, evaluating a conflict of use, justifying a differentiated request for financing or producing an impact assessment by type of mobility. However, not all sensors know how to make this distinction. Some count without differentiating. Others differentiate poorly or unreliably. And some succeed in doing so natively, with sufficient precision for territorial uses. This article explains how multi-stream classification works, what technologies actually allow it, and what are the limitations to know before choosing a sensor.

In a context of the development of active mobility, infrastructure managers need differentiated data, not only global counting.
To size the layouts. A greenway that welcomes 80% of cyclists and 20% of pedestrians is not designed in the same way as a road with balanced use. Lane width, passing zones, rest areas, traffic signs, and pavement all depend on the mix of real users. An overall count does not allow this calibration.
To assess conflicts of use. On a mixed road, conflicts between pedestrians and cyclists (speed, overtaking, feeling of insecurity) are linked to the ratio between the two flows and to peaks of co-presence. Knowing that on a summer Saturday at the end of the morning 70% of the passages are by cyclists makes it possible to anticipate areas of tension and to adapt the management of the site.
To justify differentiated funding. AVELO programs fund cycling facilities. Programs to promote natural areas finance pedestrian paths. A case based on differentiated data can apply to both sources of funding in a credible manner. A case with an overall count cannot demonstrate that the infrastructure primarily serves cyclists or pedestrians.
To produce consistent active mobility indicators. Regional and national observatories of active mobility require differentiated data to feed their indicators. A community capable of declaring “we measured 4,200 cyclists and 1,800 pedestrians per week on this axis” contributes to much more useful territorial databases than a community that declares “we measured 6,000 crossings”.
To distinguish a pedestrian from a cyclist, a sensor must analyze at least one of the following signals: the size or shape of the detected subject, its speed of movement, its footprint on the ground, or its energy signature.
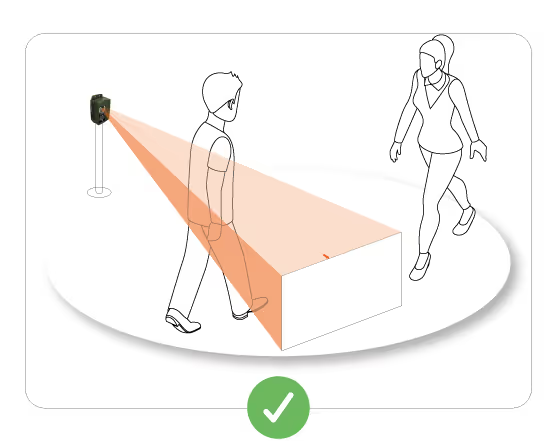
The size and the shape. A cyclist on his bike occupies a vertical surface that is taller and wider than a standing pedestrian. On a thermal sensor, the signature of a cyclist in motion is characteristic: mass extended horizontally (the bike), hot spot at the chest level. A pedestrian has a narrower and more vertical signature.
The speed. A cyclist typically moves between 12 and 25 km/h on a greenway. A pedestrian between 3 and 6 km/h. This difference in speed is a strong discriminating signal that sensors with trajectory analysis can exploit.
The footprint on the ground. Buried sensors (inductive loops, pneumatics) detect the physical footprint on the ground: bicycle wheel vs human foot, metal mass vs absence of mass. These signals allow differentiation on certain profiles, but with significant limitations (cargo bikes, scooters, PMR in motorized wheelchairs).
The combination of multiple signals. The most efficient sensors do not rely on a single signal but on a combination — size + speed + shape — analyzed by a classification algorithm. This approach is more robust than single-signal methods because it maintains acceptable accuracy even when one of the signals is noisy or ambiguous.
Not all counting technologies are equal when it comes to multi-stream classification. Here is the real status of each large family.
Today, it is the technology that offers the best accuracy/ease of installation ratio for the classification of pedestrians/cyclists outside. The dual stereoscopic sensor analyzes the scene in three dimensions, allowing the height and width of the detected subject to be measured with good precision.
The classification algorithm analyzes the heat signature, height, width, and speed of each pass in real time. The correct classification rates reach 90 to 95% under normal conditions — which is more than sufficient for territorial uses. All without an image, without an identifier, in native compliance with the RGPD.
Main limit: the simultaneous passage of a pedestrian and a cyclist side by side can generate classification confusion. Very dense configurations remain difficult to manage perfectly for any technology.
Radar sensors measure the speed and direction of moving objects. They can distinguish very different speed flows (pedestrian at 4 km/h vs cyclist at 20 km/h) with good reliability. On the other hand, two users of similar speed (a fast pedestrian and a slow cyclist) may be misclassified.
Radars are robust in bad weather and at night, but their classification accuracy is generally lower than that of stereoscopic thermal sensors. They are better suited to expressways where there is a marked difference in speed between flows.
Cameras combined with video analysis software theoretically offer the richest classification: shape, size, speed, behavior, color. But they pose major GDPR compliance problems (even if blurred, they capture visual data in a public space), require a permanent electrical infrastructure and generate significant operating costs.
They remain relevant in very specific contexts — entrances to private sites with access control, high-density areas where the wealth of data justifies the constraints — but they are not adapted to current territorial uses.
These buried technologies allow limited differentiation: the inductive loop detects metal masses (classic bicycles yes, pedestrians no); the pneumatic tube can distinguish two wheels close together (bicycle) from alternating strikes (pedestrian) with adapted algorithms.
But they don't produce a reliable classification on complex mixed flows and don't detect carbon frame bikes, electric scooters, or motorized wheelchairs. For a truly mixed use greenway, these technologies are insufficient.
Even the best classification technologies have limitations that every user should be aware of.
Atypical profiles. A cyclist who walks next to his bike (to cross an obstacle or to stop) will be classified as a pedestrian. A pedestrian who pushes a bulky stroller can be classified as a cyclist on some sensors. Children on bikes have a very different signature from adults on bikes. These marginal cases generate occasional classification errors.
Simultaneous passages. When a pedestrian and a cyclist pass through the detection field at the same time, the less sophisticated sensors can count them as a single pass or classify them incorrectly. Stereoscopic sensors handle this situation better thanks to their in-depth analysis, but not perfectly.
Atypical speeds. A very slow cyclist (who observes a landscape, who is looking for his way) can have a speed close to that of a fast pedestrian. In this case, classification based on speed alone is unreliable. Sensors that combine speed and shape fare better.
Nighttime degradation. On poorly lit roads, some technologies see their classification accuracy deteriorate at night. Thermal sensors are less affected because they are not dependent on visible light, but changes in nighttime ambient temperatures can change the thermal signature.
The margin of classification error vs the margin of counting error. A sensor may have excellent overall counting accuracy (95—98%) but lower classification accuracy (88—92%). These two metrics are distinct and should be requested separately from the supplier. A sensor that counts well but ranks poorly does not meet the need if the distinction between pedestrians and cyclists is the main objective.
To avoid unpleasant surprises, here are the questions to always ask any multi-flow sensor supplier.
What is the accuracy of classification (not only counting) on mixed channels? Request validation data on sites similar to yours: same type of road, same mix of users, same environmental context.
What algorithm is used for classification? A single-signal algorithm (speed alone or size alone) is less robust than a multimodal algorithm combining several parameters. Transparency about the method is an indicator of seriousness.
How does the sensor behave on atypical profiles? Slow cyclists, fast pedestrians, cargo bikes, scooters, wheelchairs — ask how each profile is treated and classified.
Is classification accuracy maintained at night and in bad weather? Degraded conditions reveal the real limits of technologies.
Can raw classification data be obtained for quality control? A provider that does not allow access to detailed classification data makes any data quality audit impossible.
Multi-stream classification with a single sensor is possible and reliable in most standard configurations. But there are situations where a more elaborate device is needed.
A single sensor is enough on a mixed-use pedestrian/cyclist lane with a width of 2 to 4 meters, flows separated in time (few simultaneous passages) and standard user profiles (adults, normal speeds). In this context, a well-installed stereoscopic thermal sensor produces a classification that is 90—95% reliable.
A single sensor is not enough on a very wide track (more than 5 meters) where flows intersect constantly, on a very high density site with numerous simultaneous passages, or in configurations where very atypical profiles (large cargo bikes, non-standard mobility vehicles) represent a significant part of flows.
Two complementary sensors — one oriented to the flows on the left, the other to the flows on the right — can solve the problems of very wide channels or intense bi-directional flows.
A sensor + a manual validation audit punctual (manual counting over a few reference days) makes it possible to calibrate the classification algorithms and to validate the reliability of the device on a specific site. This approach is recommended for high-stakes sites where classification accuracy is a condition for significant investment decisions.



.svg)